Descriptions:
Lech Kalinowski, PhD physicist and developer at Callstack, presents the OpenClaw terminal — a custom-built, handheld physical device designed to control OpenClaw (an open-source LLM agent framework) from hardware rather than a laptop or phone. The device combines an OLED display for live text rendering with a bistable e-paper display for stable output, driven by an ESP32 dual-core microcontroller with a physical keyboard and rotary encoder, all powered by a custom-built power management system that Kalinowski had to design after blowing up two earlier prototypes.
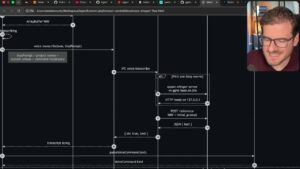
The backend is a full server stack: vault firmware on the terminal communicates with a backend that handles agentic work through OpenClaw, backed by a TensorRT-optimized serving system running a 120-billion-parameter open-source GPT model exposed through an OpenAI-compatible API proxy. Kalinowski chose TensorRT serving specifically because many open-source models fail to properly implement the OpenAI API style, making a compatibility layer essential. The talk includes unusually candid field notes: software I2C wiring failures, a GPIO 13 silent failure requiring port migration, regulator-induced component damage causing multi-week replacement delays, and rotational noise from low-quality encoders requiring pull-up resistors and capacitors.
Beyond its core use case as a remote AI workstation controller, the device features an RPG mode — a text-based role-playing game with custom NPC memory, world-building, and mood systems — demonstrating that LLM-powered interactive narrative is a natural fit for constrained, text-focused hardware. The project is a practical proof of concept for what AI-native operating systems could look like at the microcontroller level.
📺 Source: AI Engineer · Published June 28, 2026
🏷️ Format: Hands On Build